SE380: Introduction to Feedback Control
Taught by Gennaro Notomista (Fall 2024). Notorious course that we have to take… Notes taken on iPad / paper.
chapter 20 → open loop
Practice problems:
- E2.2 E2.3 E2.4 E2.6 E2.10 E2.11 E2.16 E2.17 E2.18 E2.19 E2.31
- E3.2 E3.3 E3.4 E3.6 E3.8 E3.10 P3.11 P3.16 P3.19 P3.25
- E4.3 E4.4 E4.5 E4.10 E4.11 E4.12 E4.15
- E5.19 CP5.1 CP5.3
- E6.1 E6.2 E6.3 E6.4 E6.9 E6.10 E6.11 E6.12 E6.13 E6.14 E6.21 E6.22 E6.23 E6.24 E6.25 E6.26 P6.20 P6.21
- E7.1 E7.3 E7.15 E7.16 E7.24 E7.25 E7.26 E7.27
- E8.1 E8.2 E8.3 E8.4 E8.5 E8.6 E8.7 E8.12 E8.14 E8.15
- E9.1 E9.2 E9.5 E9.7 E9.11 E9.16 E9.24 E9.29 E9.32 E9.33
- E10.1 E10.2 E10.4 E10.7 E10.14 E10.19 E10.20
- E11.1 E11.2 E11.12
Concepts
- State Space Form
- Linearization
- Laplace Transform
- BIBO stable
- Bode Plots
- Routh Algorithm
- Nyquist Plot
- Nyquist Criterion
- Bode Criterion
- Loop Shaping
- Integral Control
- Lead-lag Compensators
- PID Controllers
- Root Locus
Project
- Project Task 1
- Project Task 2
- Project Task 3
Final
Thoughts:
- The textbook problems did not help at all.
- 4 questions total. Each worth 10 points.
- Complete disaster. Had one on designing a PID controller. One on matching the root locus plot (with the zeros and poles) to the phase diagram. Explain which one would become unstable while increasing the gain or something. Third question had to do with (spaceX) designing a controller with no overshoot. Fourth question had us find stability, bibo stable, transfer function, design a controller with a 3x3 matrix.
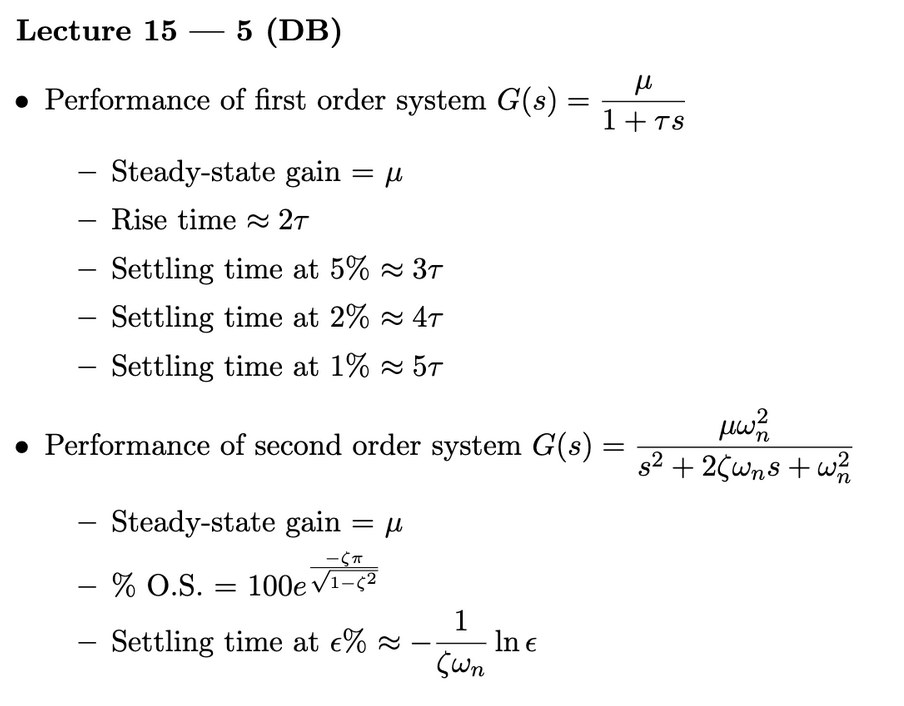
Midterm
Lecture 1 - 16 (I think)
Memorize: